模糊模型在机械加工控制系统中的应用与可持续性评价-田雪松博士
不同加工方法的切削速度对切削区的温度和工艺的强度特性有模糊的影响。应根据切割工艺的温度-强度状态,选择一定的处理方案,
发布时间:2024-10-17

模糊模型在机械加工控制系统中的应用与可持续性评价-田雪松博士
不同加工方法的切削速度对切削区的温度和工艺的强度特性有模糊的影响。应根据切割工艺的温度-强度状态,选择一定的处理方案,
发布时间:2024-10-17
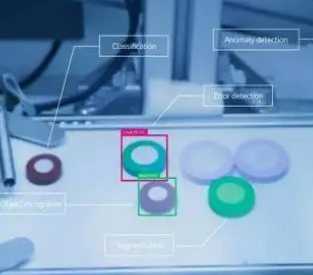

先进机器人技术中的人工智能、机器学习和深度学习综述-潘剑飞博士
人工智能(Artificial intelligence, AI)、机器学习(machine learning, ML)和深度学习(deep learning, DL)都是机器人领域的重要技术。人工智能(AI)一词描述了机器执行通常需要人类智能的操作的能力,
发布时间:2024-10-16

负责任地处理报废产品包括再利用、回收或再制造产品或部件。这些工艺在环境和经济上都是有益的。最大限度地减少浪费,同时回收有价值的组件和材料。
发布时间:2024-10-16

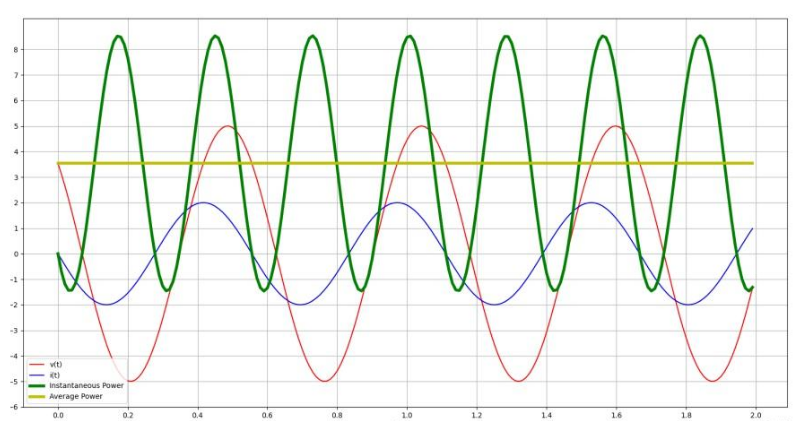
一种降低串联谐振双半桥变换器导通损耗的低复杂度轨迹控制器-刘艺涛博士
本文描述了一种低复杂度的轨迹控制器,用于实现串联谐振双半桥变换器(SR-DHB)导通损耗的近最优最小化。
发布时间:2024-10-16

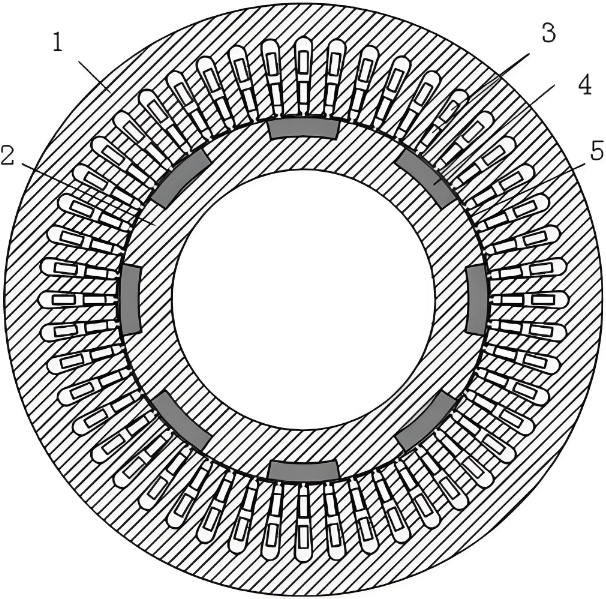
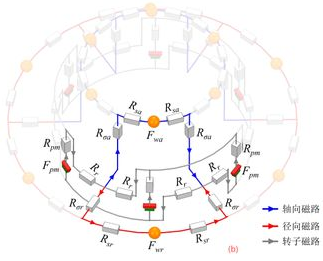
交流电机由于其结构简单、鲁棒性高、可靠性低、价格高、效率高等优点,在工业应用中一直被用作主力。交流电机驱动已广泛应用于许多需要高性能工业和工艺应用。
发布时间:2024-10-16
对于传统的电感功率传输(IPT),通常采用两级结构进行恒流(CC)和恒压(CV)充电,但级联dc-dc变换器会降低其效率。
发布时间:2024-10-16
发布时间:2024-10-14