基于深度卷积神经网络CNN的人工智能面膜检测技术预防Covid 19大流行之猜想-乔牧博士
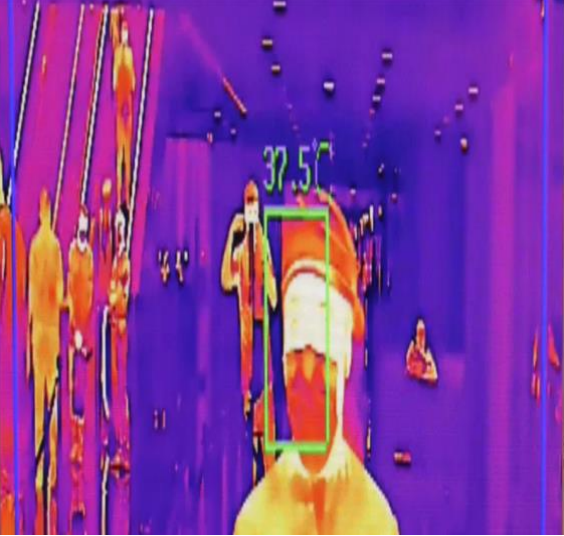
在医疗危机时期,机器人和人工智能帮助人类管理紧急情况,并确保快速有效的去污过程。采用新型生物传感器的电晕病毒检测器和基于深度卷积神经网络的人工智能面膜检测方法我猜想提出了一种温度检测机器人。
发布时间:2023-08-28
基于深度卷积神经网络CNN的人工智能面膜检测技术预防Covid 19大流行之猜想-乔牧博士
在医疗危机时期,机器人和人工智能帮助人类管理紧急情况,并确保快速有效的去污过程。采用新型生物传感器的电晕病毒检测器和基于深度卷积神经网络的人工智能面膜检测方法我猜想提出了一种温度检测机器人。
发布时间:2023-08-28
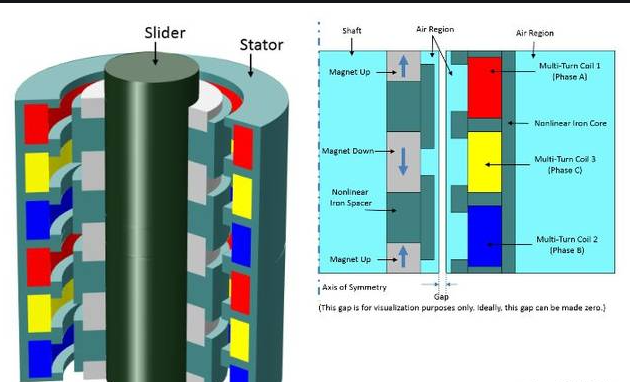
随着自动控制技术和微型计算机的迅速发展,各种自动控制系统的位置精度的重要性日益突出。在这种情况下,传统的由旋转电机和转换机构组成的直线运动装置已远远不能满足现代控制系统的要求。永磁直线电机(PMLM)无需任何开关机构即可直接将电能转化为直线运动。因此,越来越多的研究者致力于PMLM的研究和开发。
发布时间:2023-08-25
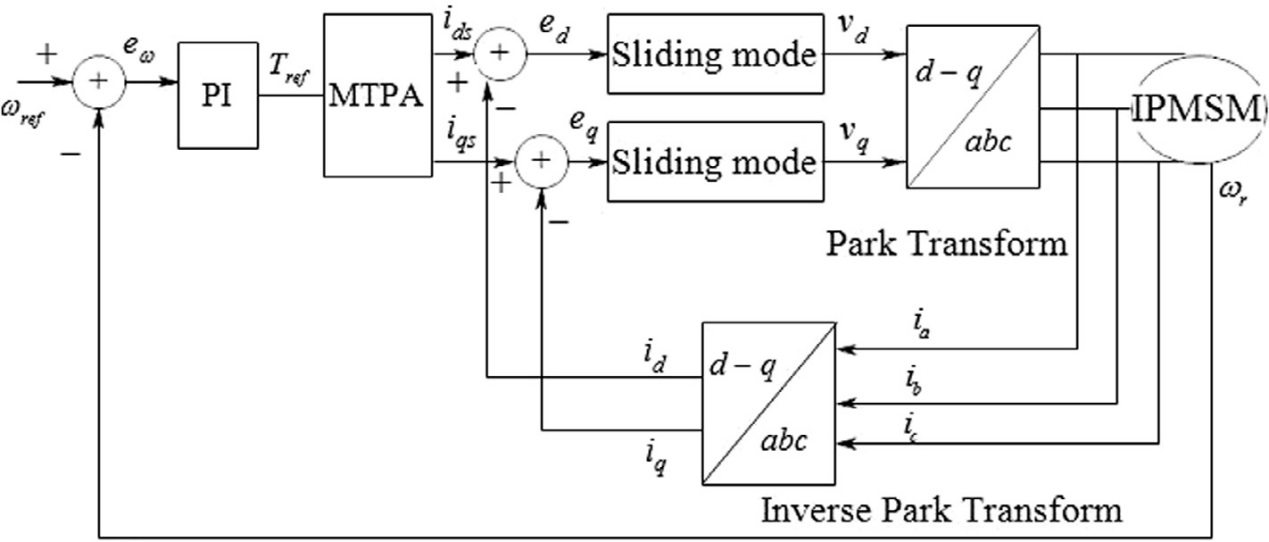
基于MTPA的自适应分数阶滑模控制器的IPMSM速度和电流控制-张铸博士
扭矩和功率电流比、高效率和鲁棒性使内置式永磁同步电机(IPMSM)在工业应用中得到广泛使用。IPMSM的非线性动态、电气和机械不确定性以及外部负载干扰导致在IPMSM控制应用中使用先进的新方法。
发布时间:2023-08-25

本文研究了具有模型不确定性的欠驱动机械系统的控制问题。该控件采用反步方法设计。一阶低通滤波器用于估计未知量并避免“项爆炸”。
发布时间:2023-08-25

学习控制系统与智能控制系统 人工智能与自动控制的交叉-徐翠东博士
通过简要介绍该领域的进展,促进对与学习控制相关的几个领域的进一步讨论。这些领域包括:1)具有人类控制器的控制系统,2)具有人机控制器的控制体系,以及3)自主机器人系统。
发布时间:2023-08-25
过去的十年,仿佛是人工智能技术领域的“寒武纪大爆发时代”,大量新名词在短时间内迅速产生、并且迅速流行起来。这些新名词及其缩写,许多都没有统一的中文译名,而行业内人士间也普遍直接用英文缩写进行交流。这为想要全面理解这些技术的外行人制造了认知上的障碍。
发布时间:2023-08-25

近年来,随着虚拟现实(VR)技术的迅猛发展,其在康复领域的应用越来越受到关注。软瘫期患者的肢体康复一直是康复临床工作中的难点,而脑机接口和运动想象作为近年来康复领域的研究热点,为康复训练提供了新的思路和方法。
发布时间:2023-08-25

