学习控制系统与智能控制系统 人工智能与自动控制的交叉-徐翠东博士
通过简要介绍该领域的进展,促进对与学习控制相关的几个领域的进一步讨论。这些领域包括:1)具有人类控制器的控制系统,2)具有人机控制器的控制体系,以及3)自主机器人系统。
发布时间:2023-08-25

学习控制系统与智能控制系统 人工智能与自动控制的交叉-徐翠东博士
通过简要介绍该领域的进展,促进对与学习控制相关的几个领域的进一步讨论。这些领域包括:1)具有人类控制器的控制系统,2)具有人机控制器的控制体系,以及3)自主机器人系统。
发布时间:2023-08-25
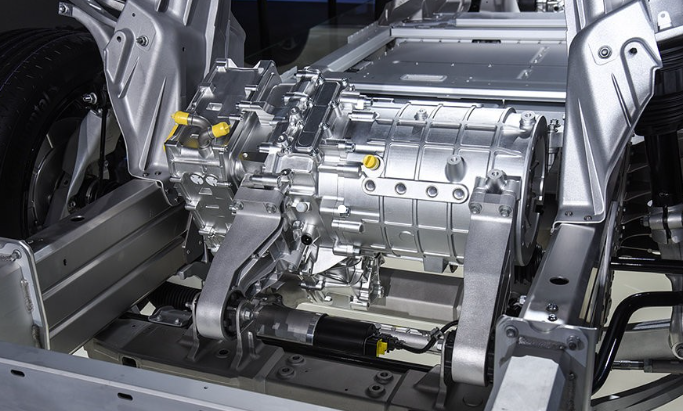
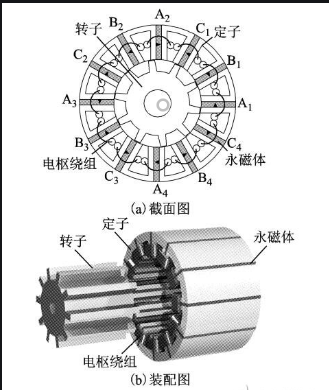
永磁同步电机(PMSMs)结构简单,功率密度高,效率高,广泛应用于电动汽车(EVs)、机器人、数控机床、航空航天、泵等工程领域。永磁同步电机是一个多变量强耦合,存在扰动和不确定性,如载荷扰动、参数失配、摩擦和非模态动力学的非线性系统。
发布时间:2023-08-25

HAPTIC接口(HIs)与其他形式的人机交互不同,它通过机械的双向信息交换,由一个操纵器介导,强制用户动作和努力之间的关系。当需要精度时,触控笔是一种常见的交互工具,可以在多个自由度上交换运动和力度信号。
发布时间:2023-08-23
与传统的导电充电相比,无线电力传输(WPT)是一种新兴技术,具有自动化、安全和方便的优点。近场WPT可分为电容功率传输和感应功率传输(IPT),并可应用于许多领域,如无线传感器网络、植入式医疗设备、消费电子产品、家用电器、电动汽车(EV)[和铁路运输。
发布时间:2023-08-23

基于信号注入技术对配备逆变器输出的智能同步电机无传感器控制技术研究-赵继涛博士
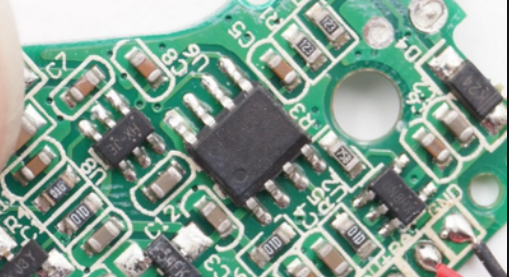
在交流电机驱动中,脉宽调制逆变器产生的非正弦电压可能会导致多种问题。首先,高变化率的电压(即高du/dt)可能会给定子绕组绝缘带来过大的电压应力。此外,高变化率的电压还可能通过定子绕组的寄生电容引起泄漏电流,从而产生轴承电流。电压谐波也可能导致声学噪声和功率损失。对于高速实心转子电机,涡流引起的损耗是一个特别需要关注的问题。因此,为了保证电机的安全和可靠运行,需要采取措施来降低这些负面影响。
发布时间:2023-08-23

基于Hildreth的嵌入式肘关节矫形器模型预测控制-刘湘辉博士
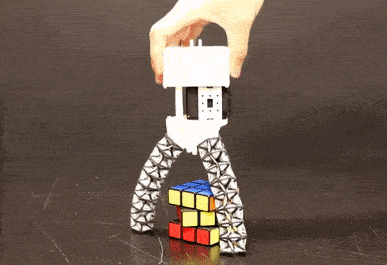
在过去的几年里,机器人设备已被广泛用于改善医疗服务的许多策略中。最著名的医疗机器人之一是机器人矫形器或外骨骼。这些机器人已被用于拯救和帮助人们实现残疾肢体的机器人康复,并为老年人或残疾患者提供舒适的医疗保健。
发布时间:2023-08-23
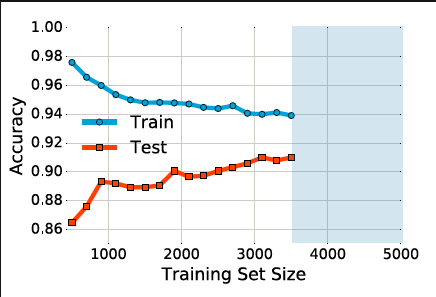
在本文中,我们建议研究神经网络在算法生成的小数据集上的泛化。在这种情况下,可以非常详细地研究有关数据效率、记忆、概括和学习速度的问题。在某些情况下,我们表明神经网络是通过在数据中“摸索”模式的过程来学习的,将泛化性能从随机机会水平提高到完美泛化,并且这种泛化的改进可以远远超过过拟合点。
发布时间:2023-08-22
电缆驱动并联机器人 (CDPR) 由底座和移动平台组成。一组由绞盘驱动的电缆并由底座上的滑轮引导连接到移动平台上。这些电缆用于产生运动或施加在整个工作空间中对移动平台施加力。
发布时间:2023-08-22
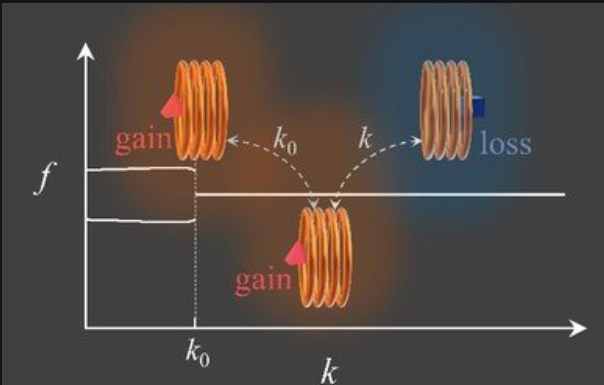
通过自共振线圈,在强耦合状态下,我们在实验中展示了高效的非辐射式能量传输,其距离达到了线圈半径的8倍,能够在超过2米的距离范围内以约40%的效率传输60瓦的功率。我们提出了一个定量模型来描述功率传输,该模型与实验结果符合率高达95%。我们讨论了该系统的实际适用性,并提出了进一步研究的方向。
发布时间:2023-08-22
本文介绍了一种基于人工神经网络(ANN)的开关磁阻电机(SRM)。SRM电机是一种电子控制电机,如无刷直流电动机。
发布时间:2023-08-22