随着人工智能(AI)在放射学中找到自己的位置,如今是要考虑的是如何以最有利于患者的方式指导研究和临床实施。
发布时间:2023-08-30


随着科学技术和人工智能的发展,移动机器人广泛应用于多个领域,机器人能够正常工作,与SLAM密不可分,1986 年 ICRA 会议上,SLAM 首次被提出,其最 先用于军事机器人领域。先后经历了算法分析时期和鲁棒性时期。
发布时间:2023-08-30
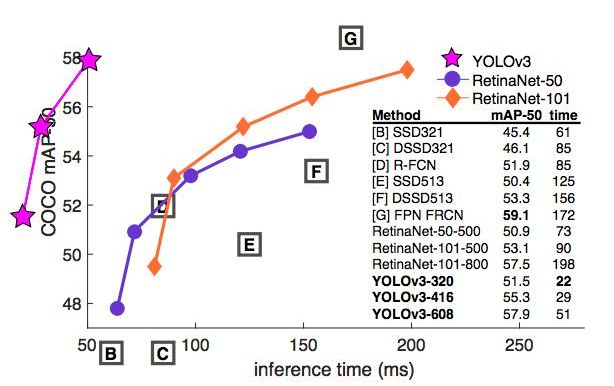
本文将介绍两篇计算机视觉领域的论文:《Rich feature hierarchies for accurate object detection and semantic segmentation》和《How to perform object Detection with yolov3 in keras》。这两篇论文分别探讨了物体检测和语义分割的问题,并提出了不同的解决方案。
发布时间:2023-08-30


行人重识别(Person Re-Identification,简称ReID)是计算机视觉领域的一个重要研究方向,其目的是在视频监控系统中,通过分析不同场景下的行人图像,从而将同一行人在不同的摄像头视角下进行识别。
发布时间:2023-08-28
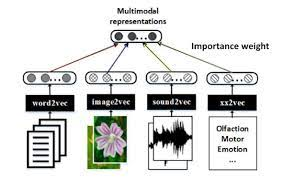
多模态机器学习(Multimodal Machine Learning)研究探索的是涉及不同模态数据的机器学习问题。常见的模态包括视觉、文字和声音,这些模态通常来自于不同的传感器,数据的形成方式和内部结构也有很大的差异。
发布时间:2023-08-28


在传统的分布式功率控制(DPC)算法中,对系统中的每个用户都采用相同的处理方法,即对系统中的每个用户都采用相同的功率控制算法。
发布时间:2023-08-28

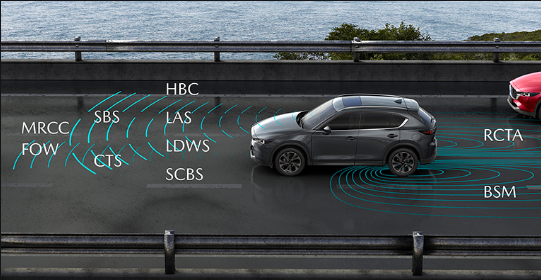
半自动自适应巡航控制(SAACC)的概念已经被提出。该系统与目前的自适应巡航控制(ACC)系统相比,在公路安全和交通流容量方面具有显著的优势。
发布时间:2023-08-28